Shukrullo Nazirjonov

Hi 👋 I’m Shukrullo.
I am interested in building physically realistic, scalable world models for robots.
Recently I finished my Master’s thesis in the Autonomous Learning group at the University of Tübingen.
Always happy to talk about research and cool stuff — feel free to reach out.
⌯⌲ shukrullo dot nazirjonov at fau dot de
News
- Jul 2026 My master thesis project “Better Slots, Better Worlds: Representation Quality & Robustness in Object-Centric World Models” has been accepted to RLC 2026 World Models Workshop and EWRL 2026
- Jun 2025 Our team (#228) LeDetective Davinci made it to Top 30 globally at the Worldwide LeRobot Hackathon by Hugging Face.
- Mar 2025 Attending the ELLIS Winter School on Foundation Models in Amsterdam, Netherlands.
- Oct 2024 Had a wonderful time hiking in the Italian Alps and discussing recent deep learning methods at the “Deep Learning for Image and Video Processing” summer school in Südtirol, Italy. Slides
- Sep 2023 Wrapped up a great internship at the intersection of RL and robotics at the Max Planck Institute for Intelligent Systems in Tübingen, Germany. Slides
- Oct 2022 Our work on Visual Tactile Sensor Based Force Estimation for Position-Force Teleoperation was selected as a Best Paper Award finalist at the IEEE International Conference on Cyborg and Bionic Systems.
Selected publications
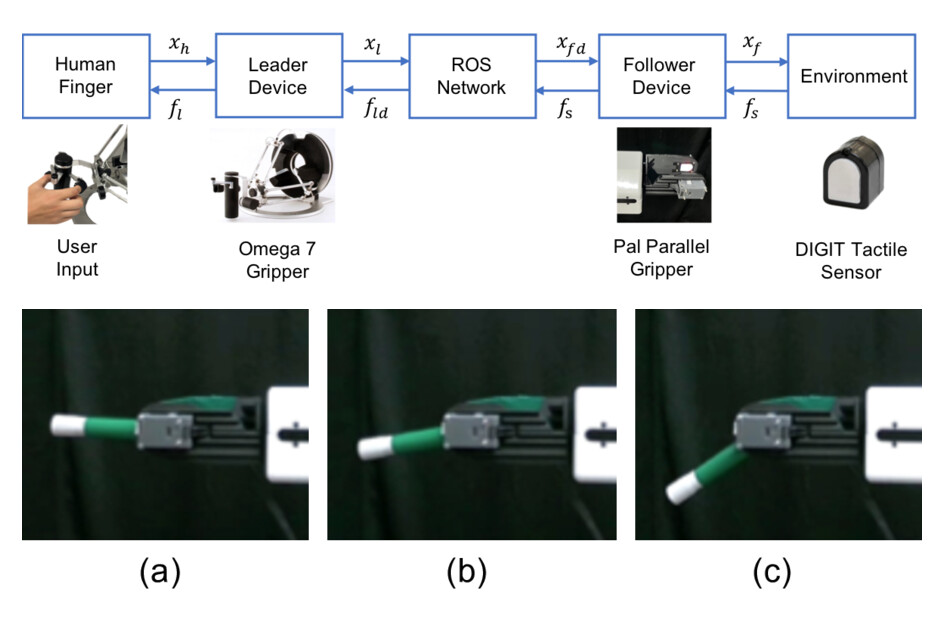
Visual Tactile Sensor Based Force Estimation for Position-Force Teleoperation
IEEE International Conference on Cyborg and Bionic Systems (CBS), 2022 Best Paper Award Finalist
IEEE Xplore · arXiv · Code